
In a world first, Saab Seaeye successfully docked an autonomous vehicle to an Equinor subsea docking station to recharge its batteries and download data, demonstrating that a new future in underwater technology has arrived.
It is a breakthrough that positions Saab Seaeye as leader in subsea resident robotics.
Representatives from across the offshore energy industries gathered at Sweden’s Lake Vättern to witness the successful docking of the Saab Seaeye Sabertooth autonomous vehicle, at Norwegian energy firm, Equinor’s, open-standard subsea docking station (SDS).
From the docking station the Sabertooth was sent on various autonomous transits to undertake mock inspection tasks that included returning to the station for recharging and video data download.
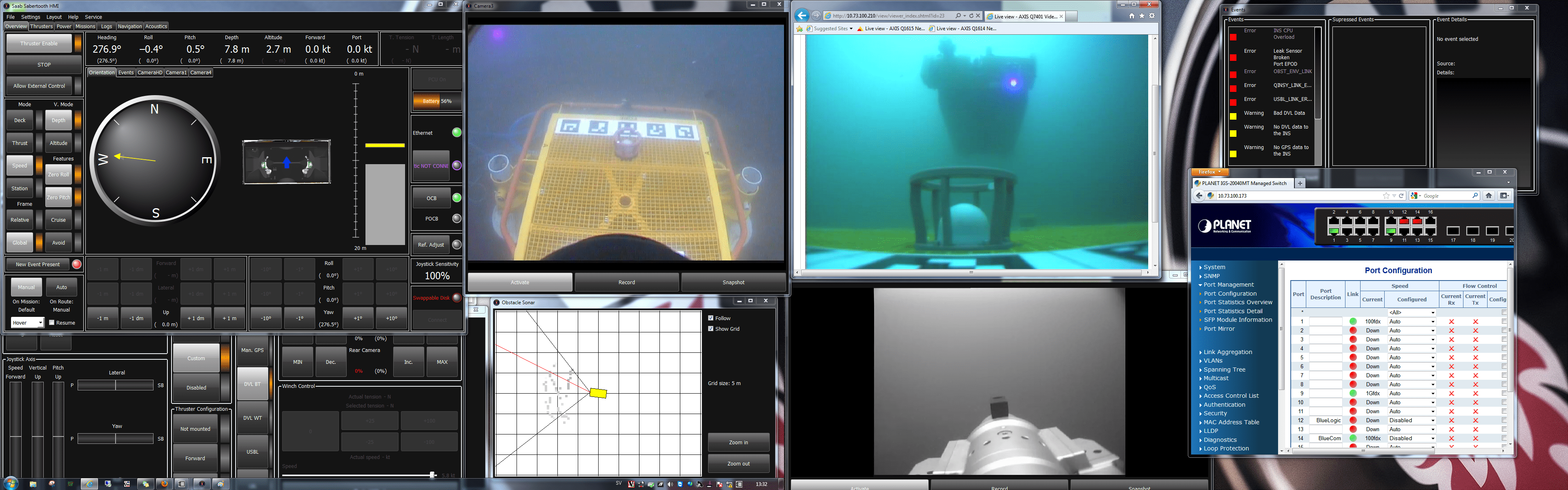
Control panel view with Sabertooth in pioneering docking manoeuvre
Commenting on this pioneering achievement, Jon Robertson, managing director of Saab Seaeye Ltd, said: “For 30 years we have been in the forefront of developments and it’s brilliant to see a major advance in the future of the industry come to fruition.”
He adds that residency is now a deliverable option that will reduce operational expenditure and remove humans from offshore, and reduce environmental impact.
Representatives at the event saw a clear business case for safe operations, lower cost and lower carbon, by reducing the need for humans and vessels offshore and allowing fields to be designed in different ways to increase production efficiency and be profitable in remote areas.
The docking station at the demonstration was produced by Blue Logic and includes their inductive power and data connectors. Whilst docked the vehicle was charged and data uploaded and downloaded via the connectors.
Live video and vehicle control were made possible with Sonardyne’s BlueComm free-space optical modem.
Much of the demonstration was run with pre-programmed autonomous route plans. Also advanced motion controls via the BlueComm system, enabled operators to move the vehicle from an automatically held position by set amounts using a touchscreen user interface. The mating of a TMT electric torque tool to a valve panel was also performed with control and video relayed via the BlueComm system.
Also demonstrated was an underwater simultaneous localization and mapping (UWSLAM) that allows a pilot to ‘see’ the environment as a 3D map in real time whilst flying around – and by leaving a ‘snail trail’ the system can determine precise vehicle positioning relative to the map and provide effective station-keeping and augmented navigation functions. As the 3D point cloud generated by the system has a resolution of one millimetre, precise measurement of the size and position of objects is possible.
3D simulation was on show, providing a real-time software interface for custom-development and viewing of Sabertooth functionality, including debugging new operations and algorithms.
In addition to Equinor, who has driven the open-standard SDS and is working with industry via the Subsea Wireless Interest Group (SWIG), other representatives from major operators were at the event, along with other companies who may use SDS, including Saipem, Oceaneering, IKM Subsea and Eelume. Also present were those who could supply power to these vehicles, such as Ocean Power Technologies, along with service suppliers like Modus, ROVOP and DeepOcean.
The potential revealed at the demonstration would not be possible but for Equinor’s development of the open-standard subsea docking station concept and Saab Seaeye’s Sabertooth which is the only hovering autonomous system that can operate in both AUV and ROV modes and handle connections in both the horizontal and vertical plane – and the only vehicle currently on the market capable of undertaking long-term residency in difficult to access locations.